![]()
![]()
![]()
Marek Žák
Hexapod, Legged chassis, Walking robot, Hexapod gaits
Robotika a umělá inteligence
This paper aims on design, construction and control of hexapod robot, which is six-leg walking robot. Basic characteristics of legged robots, a few existing robots and their pros and cons are described. Paper also describes basic gaits, which are used by legged robots for their locomotion. Result of this project is a legged robot, which can walk using tripod, wave and ripple gait and is equipped with sonars, force-sensitive resistors and encoders. Robot is controlled and monitored from user interface program. It can display data from sensors and positions of robot’s legs. The robot can be used to test and verify algorithms, gaits and features of walking robots.
![]()
![]()
Lenka Turoňová
Parallel systems, Formal verification, Petri nets, Coverability, Abstraction, Well-quasi-ordered transition systems
Testování, analýza a verifikace
We improve existing method for the automatic verification of systems with parallel running processes. The technique is based on an effort to find an inductive invariant using a variant of counterexamplequided refinement (CEGAR). The effectiveness of the method depends on the size of the invariant. In this paper, we explore the possiblity of improving the method by focusing on finding the smallest invariant.

![]()
![]()
![]()
Ladislav Mošner
3D printing, delta printer, Fused Deposition Modeling, Fused Filament Fabrication, RepRap
Počítačová architektura a vestavěné systémy
This paper deals with the topic of 3D printing. The primary aim was to build a real printer with a stiff construction minimizing clearance. The design of the 3D printer and its parts was highly influenced by the RepRap project, especially by the Rostock printer based on the delta kinematics, and Fused Deposition Modeling. The solution is formed using the Arduino Mega 2560 platform running Marlin firmware. Our printer uses a newly designed extruder that should prevent a filament from melting in a guide tubule due to a large heatsink. In order to evaluate the accuracy of the 3D printer, multiple tests were performed. The advantages and weaknesses of the modified design presented here can be very helpful for other people who may decide to build their own 3D printer.
![]()
![]()
Karel Beneš
Grammar-based language model, Push-to-talk button, Automatic Speech Recognition
Zpracování dat (obraz, zvuk, text apod.)
This paper describes the construction of a speech recognition system for usage in the aeronautics cockpit. The primary goal of the recognizer is to allow pilots to control parts of the cockpit by voice. Speech recognition in the cockpit is challenging, because of changing context, variable noise and the possibility of off-talk. The recognizer is based on the Kaldi speech recognition toolkit and several project-specific components are implemented in C++. Additionally, a specific way of creating language model for coping with noises is presented. In general, we describe how to use a research-oriented speech recognition toolkit in a real-world application.
![]()
![]()
![]()
Martin Šimon
object tracking, bidirectional tracking, partial occlusion, long-term tracking, full occlusion, rough camera movement
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
Visual object tracking with focus on occlusion, background clutter, image noise and unsteady camera movements, those all in a long-term domain, remain unsolved despite the popularity it experiences in recent days. This paper summarizes a related work which has been done in trackers field and proposes an object tracking system focused on solving mentioned problems, especially the occlusion, rough camera movements and the long-term task. To solve these problems we propose a system combined from three parts; the tracker, which is the core part, the detector, to re-initialize tracker after a failure or an occlusion, and a system of adaptive learning to handle long-term task. The tracker uses newly proposed approach of bidirectional tracking of points, which are generally weaker then commonly used keypoints. Outputs of both the tracker and the detector are fused together and the result is also used for the learning part. The proposed solution can handle mentioned problems well and in some areas is even better then the state-of-the-art solutions.
![]()
![]()
Lenka Turoňová
Parallel systems, Formal verification, Petri nets, Coverability, Abstraction, Well-quasi-ordered transition systems
Testování, analýza a verifikace
We improve existing method for the automatic verification of systems with parallel running processes. The technique is based on an effort to find an inductive invariant using a variant of counterexamplequided refinement (CEGAR). The effectiveness of the method depends on the size of the invariant. In this paper, we explore the possiblity of improving the method by focusing on finding the smallest invariant.
![]()
![]()
Martin Hruška
Forest Automata, Formal Verification, Static Analysis, Complex Data Structures, Tree Automata, Backward Run, Predicate Abstraction
Testování, analýza a verifikace
Forest automata are one of the formalisms recently used for analysis and verification of programs manipulating dynamic data structures. In the area of shape analysis there exists a tool Forester employing forest automata. Forest automata are based on tree automata and Forester has its own implementation of tree automata. However, there is the VATA library which implements the efficient algorithms for the tree automata manipulation, especially the efficient algorithms for the checking inclusion of languages of tree automata what is an operation crucial also for the verification procedure based on forest automata. The first goal of this work is to implement a version of Forester tool that uses the VATA library for tree automata manipulation. The second goal of this work is to extend forest automata based verification with backward run that checks whether a found error is a spurious or a real one what could be used for refinement of predicate abstraction. The first goal has been already fulfilled and the variant of Forester using the VATA library successfully participated in the competition SV-COMP 2015. The part of the second goal is done only partially -- the backward run is already finished and predicate abstraction implementation is in progress.

![]()
![]()
Peter Matula
reverse engineering, decompilation, data type recovery, cryptographic constants
Bezpečnost
Retargetable machine-code decompilation transforms a platform-independent executables into a high level language (HLL). Decompilers may be used by reverse engineers to manually inspect suspicious binaries (e.g. malicious software). However, modern malware is often very complex and its decompilation produces huge and enigmatic outputs. Therefore, reverse engineers are trying to use every bit of available information to aid their analysis. This paper presents a fast cryptographic constants searching algorithm. Based on the signature database, it recognises usage of constants typical for many well-known (cryptographic, compression, etc.) algorithms. Moreover, the results are used by AVG Retargetable Decompiler to make its output more readable. The presented algorithm is faster than any state-of-the-art solution and it is fully exploited in the decompilation process.
![]()
![]()
Kateřina Žmolíková
speech recognition, deep neural networks, acoustic modelling
Zpracování dat (obraz, zvuk, text apod.)
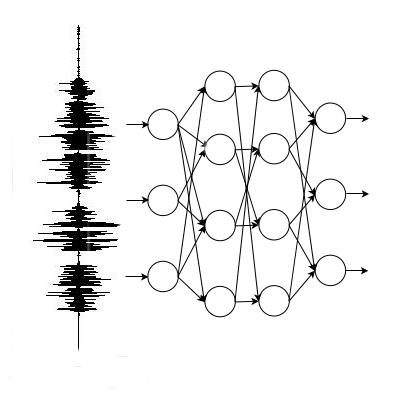
This paper presents a modification of neural network structure in speech recognition system which leads to improving the accuracy of the system. Deep neural networks are widely used as a part of acoustic model which aims to predict the score of acoustic units given the speech signal. The input of deep neural network is a sequence of speech frames. Typically the network tries to classify the central one of these frames while using the context frames as an additional information. In the multiframe model the output of the network is extended to predict classes of multiple frames. This modification leads to obtaining multiple predictions for one frame. Combining these predictions results in better accuracy of the network. The approach was tested on Wall Street Journal dataset. Experimenting with different sizes of the context on the input and output of the network lead to 7% and 12% relative improvement on two testsets.
![]()
![]()
Petr Dvořáček
kartézské genetické programování, aproximační počítání, optimalizace
Počítačová architektura a vestavěné systémy Nekonvenční výpočetní techniky
V posledních letech klademe stále větší důraz na energetickou úspornost integrovaných obvodů. Můžeme vytvořit aproximační obvody, které nesplňují specifikovanou logickou funkci, a které jsou cíleně navrženy ke snížení plochy, zpoždění a příkonu. Tyto přibližně pracující obvody lze využít v mnoha aplikacích, kde lze tolerovat chyby, obzvláště ve zpracování obrazu. Tato práce popisuje evoluční návrh aproximačních obvodů pomocí kartézského genetického programování (CGP). Díky paralelnímu výpočtu fitness a různým akceleracím byla urychlena evaluace 8-bitové násobičky více než 170 krát oproti standardnímu přístupu. Pomocí inkrementální evoluce byly vytvořeny různé aproximační násobičky a použity v procesu potlačení nemaximálních hodnot v detekci hran.
![]()
![]()
![]()
Martin Šimon
object tracking, bidirectional tracking, partial occlusion, long-term tracking, full occlusion, rough camera movement
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
Visual object tracking with focus on occlusion, background clutter, image noise and unsteady camera movements, those all in a long-term domain, remain unsolved despite the popularity it experiences in recent days. This paper summarizes a related work which has been done in trackers field and proposes an object tracking system focused on solving mentioned problems, especially the occlusion, rough camera movements and the long-term task. To solve these problems we propose a system combined from three parts; the tracker, which is the core part, the detector, to re-initialize tracker after a failure or an occlusion, and a system of adaptive learning to handle long-term task. The tracker uses newly proposed approach of bidirectional tracking of points, which are generally weaker then commonly used keypoints. Outputs of both the tracker and the detector are fused together and the result is also used for the learning part. The proposed solution can handle mentioned problems well and in some areas is even better then the state-of-the-art solutions.
![]()
![]()
![]()
Jan Bednařík, David Herman
Human gesture recognition, Human tracking using depth sensor, Human tracking from top view, 3D human body pose, Human model fitting, Articulated human model, Depth sensor
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
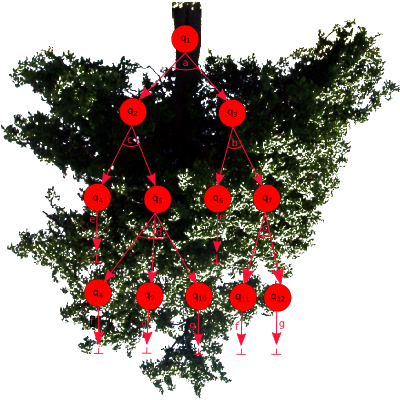
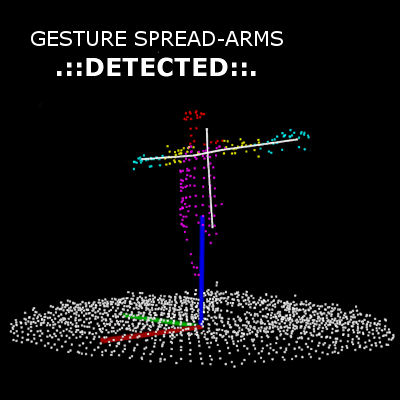
In this paper we present a system suitable for real-time human tracking and predefined human gestures detection using depth data acquired from Kinect sensor installed right above the detection region. The tracking part is based on fitting an articulated human body model to obtained data using particle filter framework and specifically defined constraints which originate in physiological properties of the human body. The gesture recognition part utilizes the timed automaton conforming to the human body poses and regarding tolerances of the joints positions and time constraints. The system was tested against the manually annotated 61-minutes-long recording of the depth data where ten different people were tracked. The 92.38\% sensitivity was reached as well as the real-time performance exceeding 30 FPS. No a priori knowledge about the tracked person is required which makes the system suitable for seamless human-computer interaction solutions, security applications or entertainment industry where the position of sensors must not interfere with the detection region.
![]()
![]()
Petr Dvořáček
kartézské genetické programování, aproximační počítání, optimalizace
Počítačová architektura a vestavěné systémy Nekonvenční výpočetní techniky
V posledních letech klademe stále větší důraz na energetickou úspornost integrovaných obvodů. Můžeme vytvořit aproximační obvody, které nesplňují specifikovanou logickou funkci, a které jsou cíleně navrženy ke snížení plochy, zpoždění a příkonu. Tyto přibližně pracující obvody lze využít v mnoha aplikacích, kde lze tolerovat chyby, obzvláště ve zpracování obrazu. Tato práce popisuje evoluční návrh aproximačních obvodů pomocí kartézského genetického programování (CGP). Díky paralelnímu výpočtu fitness a různým akceleracím byla urychlena evaluace 8-bitové násobičky více než 170 krát oproti standardnímu přístupu. Pomocí inkrementální evoluce byly vytvořeny různé aproximační násobičky a použity v procesu potlačení nemaximálních hodnot v detekci hran.

![]()
![]()
Tereza Černá
Detekce registračních značek vozidel, Klasifikace znaků, Kaskádový klasifikátor, MSER
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
Cílem této práce je detekce registračních značek vozidel a rozpoznání jejich textu. Základním přístupem pro detekci je využití kaskádového klasifikátoru. Práce je rozdělena do tří hlavních kapitol -- získání datové sady, detekce značek a rozpoznání znaků. Datová sada byla pořízena na území města Brna přímo pro účely této práce a sloužila k trénování a vyhodnocení detektorů. Další dvě části pojednávají o přípravě pozitivních a negativních vzorků dat a jejich použití při trénování kaskádového klasifikátoru. Úspěšnost detekce registračních značek byla vyhodnocena na dvou datových sadách s výsledky 100 % a 98.47 %. Aktuálně se autorka zabývá rozpoznáním znaků a~sestavením registrační značky.
![]()
![]()
Miroslav Slivka
SSL, TLS, šifrovaná komunikácia, Netfox
Počítačové sítě
Táto práca sa zaoberá sprístupnením šifrovanej komunikácie pre nástroj Netfox, ktorý vzniká na Fakulte informačních technologií, VUT v Brně pod záštitou bezpečnostného výskumu(VG20102015022) - SEC6NET. V práci je popísaná analýza SSL/TLS komunikácie a časť návrhu a implementácie samotného modulu. Implementácia zahrňuje niekoľko symetrických šifier a RSA, ktoré sa používa na výmenu kľúčov. Modul sprístupňuje šifrovanú komunikáciu pre ďalšie spracovanie a extrakciu dát v dešifrovanej podobe.
![]()
![]()
![]()
Adam Babinec
Vehicle Detection, Vehicle Tracking, UAV, Aerial Imagery, Particle Filter
Zpracování dat (obraz, zvuk, text apod.) Robotika a umělá inteligence
In this paper we present a complex solution to automatic vehicle trajectory extraction from aerial video data, providing a basis for a cost-effective and flexible way to gather detailed vehicle trajectory data in traffic scenes. The video sequences are captured using an action camera mounted on a UAV flying above the traffic scene and processed off-line. The system utilizes video stabilisation algorithm and geo-registration based on RANSAC guided transformation estimation of ORB image feature sets. Vehicles are detected in scene using AdaBoost classifier constructed of Multi-Scale Block Local Binary Patterns features. The vehicle tracking is carried out by multi-target tracker based upon set of intra-independent Bayesian bootstrap particle filters specialized to deal with environmental occlusion, multi-target overlap, low resolution and feature salinity of targets and their appearance changes. The performance of the presented system was evaluated against hand-annotated video sequences captured in distinct traffic scenes. The analysis show promising results with average target miss ratio of 22.5 % while keeping incorrect tracking ratio down to 20.4 %.
![]()
![]()
![]()
Jakub Adámek
Počítání kolonií, Analýza Petriho misek, Zpracování obrazu
Zpracování dat (obraz, zvuk, text apod.)
Analýza Petriho misek je jednou ze základních úloh v mikrobiologických laboratořích, avšak nikoli nejjednodušší. Správná analýza a vyhodnocení Petriho misek může přispět k záchraně lidského života. Práce se zabývá automatickou analýzou obrazu Petriho misek a počítáním bakteriálních kolonií. Cílem práce je vytvořit mobilní aplikaci a případná příslušenství, která by byla schopná konkurovat komerčním řešením. ColonyCatcher je aplikace určená pro mobilní zařízení se systémem Android, která je schopná pomocí spodní osvětlovací jednotky pořídit snímek Petriho misky a nadále jej analyzovat a určit počet bakteriálních kolonií. Součástí práce je popis osvětlovací jednotky a také algoritmů, které jsou použity pro počítání bakteriálních kolonií. Následuje popis použití aplikace ColonyCatcher, která provede laboranta analýzou Petriho misky v pěti snadných krocích. Přínosem práce je dostupnější aplikace a její příslušenství pro všechny mirkobiologické laboratoře.
![]()
![]()
![]()
Jan Bednařík, David Herman
Human gesture recognition, Human tracking using depth sensor, Human tracking from top view, 3D human body pose, Human model fitting, Articulated human model, Depth sensor
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
In this paper we present a system suitable for real-time human tracking and predefined human gestures detection using depth data acquired from Kinect sensor installed right above the detection region. The tracking part is based on fitting an articulated human body model to obtained data using particle filter framework and specifically defined constraints which originate in physiological properties of the human body. The gesture recognition part utilizes the timed automaton conforming to the human body poses and regarding tolerances of the joints positions and time constraints. The system was tested against the manually annotated 61-minutes-long recording of the depth data where ten different people were tracked. The 92.38\% sensitivity was reached as well as the real-time performance exceeding 30 FPS. No a priori knowledge about the tracked person is required which makes the system suitable for seamless human-computer interaction solutions, security applications or entertainment industry where the position of sensors must not interfere with the detection region.
![]()
![]()
![]()
Marek Žák
Hexapod, Legged chassis, Walking robot, Hexapod gaits
Robotika a umělá inteligence
This paper aims on design, construction and control of hexapod robot, which is six-leg walking robot. Basic characteristics of legged robots, a few existing robots and their pros and cons are described. Paper also describes basic gaits, which are used by legged robots for their locomotion. Result of this project is a legged robot, which can walk using tripod, wave and ripple gait and is equipped with sonars, force-sensitive resistors and encoders. Robot is controlled and monitored from user interface program. It can display data from sensors and positions of robot’s legs. The robot can be used to test and verify algorithms, gaits and features of walking robots.
![]()
![]()
Kateřina Žmolíková
speech recognition, deep neural networks, acoustic modelling
Zpracování dat (obraz, zvuk, text apod.)
This paper presents a modification of neural network structure in speech recognition system which leads to improving the accuracy of the system. Deep neural networks are widely used as a part of acoustic model which aims to predict the score of acoustic units given the speech signal. The input of deep neural network is a sequence of speech frames. Typically the network tries to classify the central one of these frames while using the context frames as an additional information. In the multiframe model the output of the network is extended to predict classes of multiple frames. This modification leads to obtaining multiple predictions for one frame. Combining these predictions results in better accuracy of the network. The approach was tested on Wall Street Journal dataset. Experimenting with different sizes of the context on the input and output of the network lead to 7% and 12% relative improvement on two testsets.
![]()
![]()
![]()
Jan Bednařík, David Herman
Human gesture recognition, Human tracking using depth sensor, Human tracking from top view, 3D human body pose, Human model fitting, Articulated human model, Depth sensor
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
In this paper we present a system suitable for real-time human tracking and predefined human gestures detection using depth data acquired from Kinect sensor installed right above the detection region. The tracking part is based on fitting an articulated human body model to obtained data using particle filter framework and specifically defined constraints which originate in physiological properties of the human body. The gesture recognition part utilizes the timed automaton conforming to the human body poses and regarding tolerances of the joints positions and time constraints. The system was tested against the manually annotated 61-minutes-long recording of the depth data where ten different people were tracked. The 92.38\% sensitivity was reached as well as the real-time performance exceeding 30 FPS. No a priori knowledge about the tracked person is required which makes the system suitable for seamless human-computer interaction solutions, security applications or entertainment industry where the position of sensors must not interfere with the detection region.
![]()
![]()
![]()
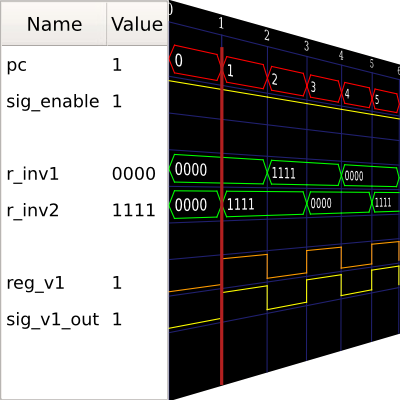
David Kovařík
modeling, simulation, visualisation, data-flow graphs
Modelování a simulace Testování, analýza a verifikace
Data-flow graphs are, for their native support of high level of parallelism, often used by hardware designers. However, such graph representation is also very useful for performing deeper analysis of the design (including functional or formal verification). Simulator presented in this paper is a support tool for verification environment HADES. The goal of the simulator is to perform an efficient simulation of a verified model and to enhance user's knowledge about the model and its behavior. To perform a simulation efficiently, we introduce a specific simulation algorithm which saves computation time by eliminating redundant evaluations. The simulator is equiped with several output interfaces connected to a single simulation core. One output interface provides direct simulation output in text format. The second is also textual, but allows user to enter commands in order to control the simulation. Finally, the third forms a graphical interface in order to visualize results of simulation process. Thus, the simulator provides a scriptable command line interface to let users write automated tests as well as a powerful visualization tool for users to better understand behavior of the model.
![]()
![]()
![]()
Marek Žák
Hexapod, Legged chassis, Walking robot, Hexapod gaits
Robotika a umělá inteligence
This paper aims on design, construction and control of hexapod robot, which is six-leg walking robot. Basic characteristics of legged robots, a few existing robots and their pros and cons are described. Paper also describes basic gaits, which are used by legged robots for their locomotion. Result of this project is a legged robot, which can walk using tripod, wave and ripple gait and is equipped with sonars, force-sensitive resistors and encoders. Robot is controlled and monitored from user interface program. It can display data from sensors and positions of robot’s legs. The robot can be used to test and verify algorithms, gaits and features of walking robots.

![]()
![]()
Jan Vašíček
Odhad nadmořské výšky, Konvoluční sítě, EXIF data
Zpracování dat (obraz, zvuk, text apod.)
Tato práce se zabývá automatickým odhadem nadmořské výšky kamery z obrazu. Úlohu jsem řešil pomocí konvolučních neuronových sítí, u nichž využívám schopnost učit se nové příznaky na základě trénovacích dat. Trénovací sada obrazů (dataset), která by obsahovala údaje o nadmořské výšce kamery, nebyla k dispozici, a proto bylo nutné vytvořit dataset nový. Schopnosti člověka v dané úloze také nebyly dříve testovány, proto jsem provedl uživatelský experiment s cílem změřit průměrnou kvalitu lidského odhadu nadmořské výšky kamery. Experimentu se zúčastnilo 100 lidí a výsledky ukazují, že průměrná chyba odhadu člověka je 879m. Automatický systém založený na konvoluční neuronové síti dosahuje lepších výsledků než člověk, neboť průměrná chyba odhadu se pohybuje okolo hodnoty 751m. Navržený systém může kromě samotného odhadu nadmořské výšky z obrazových dat nalézt uplatnění také ve složitějších úlohách, jako je vizuální geo-lokalizace kamery.
![]()
![]()
![]()
Jan Krušina
Braille Font Detection, Braille Reader, Mobile Device
Zpracování dat (obraz, zvuk, text apod.)
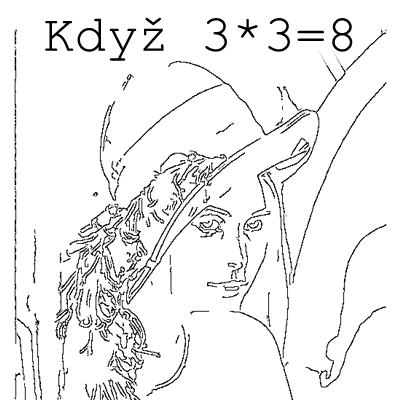
The aim of this project is to create a portable Braille reader. The main objective is to recognize Braille characters from images taken by camera on a mobile phone, convert them into Latin alphabet, and eventually display the output to the user. Solution of this task is based on a visual detection of Braille characters. Input frames from camera are processed one by one using a special algorithm which separates dots in characters from the rest of the image. Afterwards, dots are grouped into particular characters. Finally, every single character is translated and rendered on screen. This application is capable of detecting dots from books at a very high success rate. Reading from other surfaces, e.g., metal, has a good success rate as well. Thus, the application is able to detect dots on informational signs and other captions, which are commonly used. This reader gives people the ability to read text written in Braille used by blind and visually impaired people all over the world.
![]()
![]()
![]()
Jan Krušina
Braille Font Detection, Braille Reader, Mobile Device
Zpracování dat (obraz, zvuk, text apod.)
The aim of this project is to create a portable Braille reader. The main objective is to recognize Braille characters from images taken by camera on a mobile phone, convert them into Latin alphabet, and eventually display the output to the user. Solution of this task is based on a visual detection of Braille characters. Input frames from camera are processed one by one using a special algorithm which separates dots in characters from the rest of the image. Afterwards, dots are grouped into particular characters. Finally, every single character is translated and rendered on screen. This application is capable of detecting dots from books at a very high success rate. Reading from other surfaces, e.g., metal, has a good success rate as well. Thus, the application is able to detect dots on informational signs and other captions, which are commonly used. This reader gives people the ability to read text written in Braille used by blind and visually impaired people all over the world.
![]()
![]()
![]()
Adam Babinec
Vehicle Detection, Vehicle Tracking, UAV, Aerial Imagery, Particle Filter
Zpracování dat (obraz, zvuk, text apod.) Robotika a umělá inteligence
In this paper we present a complex solution to automatic vehicle trajectory extraction from aerial video data, providing a basis for a cost-effective and flexible way to gather detailed vehicle trajectory data in traffic scenes. The video sequences are captured using an action camera mounted on a UAV flying above the traffic scene and processed off-line. The system utilizes video stabilisation algorithm and geo-registration based on RANSAC guided transformation estimation of ORB image feature sets. Vehicles are detected in scene using AdaBoost classifier constructed of Multi-Scale Block Local Binary Patterns features. The vehicle tracking is carried out by multi-target tracker based upon set of intra-independent Bayesian bootstrap particle filters specialized to deal with environmental occlusion, multi-target overlap, low resolution and feature salinity of targets and their appearance changes. The performance of the presented system was evaluated against hand-annotated video sequences captured in distinct traffic scenes. The analysis show promising results with average target miss ratio of 22.5 % while keeping incorrect tracking ratio down to 20.4 %.
![]()
![]()
Barbora Franková
Softwarově definované sítě, OpenFlow, OpenDaylight, Zákonné odposlechy, Sec6Net
Počítačové sítě
Tato práce se zabývá využitím softwarově definovaných sítí v oblasti zákonných odposlechů. Staví na implementaci systému pro zákonné odposlechy vyvinuté v rámci projektu Sec6Net. Přínosem práce je rozšíření tohoto systému v několika oblastech, ve kterých SDN nabízí potenciál ke spolehlivější identifikaci odposlouchávaných uživatelů a efektivnějšímu využití sítě. První zmíněný cíl je realizován prostřednictvím modulu funkce dynamické identity, druhý pak pomocí modulu pro dynamickou konfiguraci síťových sond.
![]()
![]()
![]()
Jan Bednařík, David Herman
Human gesture recognition, Human tracking using depth sensor, Human tracking from top view, 3D human body pose, Human model fitting, Articulated human model, Depth sensor
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
In this paper we present a system suitable for real-time human tracking and predefined human gestures detection using depth data acquired from Kinect sensor installed right above the detection region. The tracking part is based on fitting an articulated human body model to obtained data using particle filter framework and specifically defined constraints which originate in physiological properties of the human body. The gesture recognition part utilizes the timed automaton conforming to the human body poses and regarding tolerances of the joints positions and time constraints. The system was tested against the manually annotated 61-minutes-long recording of the depth data where ten different people were tracked. The 92.38\% sensitivity was reached as well as the real-time performance exceeding 30 FPS. No a priori knowledge about the tracked person is required which makes the system suitable for seamless human-computer interaction solutions, security applications or entertainment industry where the position of sensors must not interfere with the detection region.
![]()
![]()
![]()
Marek Žák
Hexapod, Legged chassis, Walking robot, Hexapod gaits
Robotika a umělá inteligence
This paper aims on design, construction and control of hexapod robot, which is six-leg walking robot. Basic characteristics of legged robots, a few existing robots and their pros and cons are described. Paper also describes basic gaits, which are used by legged robots for their locomotion. Result of this project is a legged robot, which can walk using tripod, wave and ripple gait and is equipped with sonars, force-sensitive resistors and encoders. Robot is controlled and monitored from user interface program. It can display data from sensors and positions of robot’s legs. The robot can be used to test and verify algorithms, gaits and features of walking robots.
![]()
![]()

Miroslav Slivka
SSL, TLS, šifrovaná komunikácia, Netfox
Počítačové sítě
Táto práca sa zaoberá sprístupnením šifrovanej komunikácie pre nástroj Netfox, ktorý vzniká na Fakulte informačních technologií, VUT v Brně pod záštitou bezpečnostného výskumu(VG20102015022) - SEC6NET. V práci je popísaná analýza SSL/TLS komunikácie a časť návrhu a implementácie samotného modulu. Implementácia zahrňuje niekoľko symetrických šifier a RSA, ktoré sa používa na výmenu kľúčov. Modul sprístupňuje šifrovanú komunikáciu pre ďalšie spracovanie a extrakciu dát v dešifrovanej podobe.
![]()
![]()
Miroslav Slivka
SSL, TLS, šifrovaná komunikácia, Netfox
Počítačové sítě
Táto práca sa zaoberá sprístupnením šifrovanej komunikácie pre nástroj Netfox, ktorý vzniká na Fakulte informačních technologií, VUT v Brně pod záštitou bezpečnostného výskumu(VG20102015022) - SEC6NET. V práci je popísaná analýza SSL/TLS komunikácie a časť návrhu a implementácie samotného modulu. Implementácia zahrňuje niekoľko symetrických šifier a RSA, ktoré sa používa na výmenu kľúčov. Modul sprístupňuje šifrovanú komunikáciu pre ďalšie spracovanie a extrakciu dát v dešifrovanej podobe.
![]()
![]()

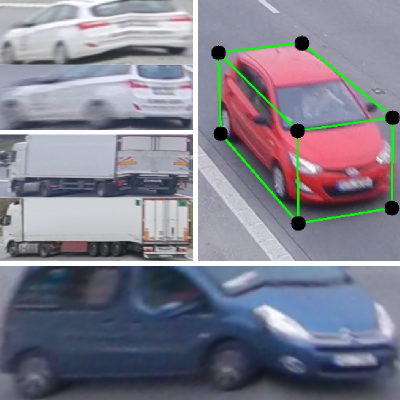
Dominik Zapletal
Vehicle re-identification, Reacquisition, Multiple camera system, Vehicle signatures, Real time systems, Video surveillance, Computer vision, Feature extraction, Image matching, Road traffic
Zpracování dat (obraz, zvuk, text apod.) Počítačová grafika
In this paper an approach to the vehicle re-identification problem in a multiple camera system is presented. We focused on the re-identification itself assuming that the vehicle detection problem is already solved including extraction of a full-fledged 3D bounding box. The re-identification problem is solved by using color histograms, histograms of oriented gradients by a linear regressor. The features are used in separate models in order to get the best results in the shortest CPU computation time. The proposed method works with a high accuracy (60% true positives retrieved with 10% false positive rate on a challenging subset of the test data) in 85 milliseconds of the CPU (Core i7) computation time per one vehicle re-identification assuming the fullHD resolution video input. The applications of this work include finding important parameters like travel time, traffic flow, or traffic information in a distributed traffic surveillance and monitoring system.
![]()
![]()
![]()

Marek Žák
Hexapod, Legged chassis, Walking robot, Hexapod gaits
Robotika a umělá inteligence
This paper aims on design, construction and control of hexapod robot, which is six-leg walking robot. Basic characteristics of legged robots, a few existing robots and their pros and cons are described. Paper also describes basic gaits, which are used by legged robots for their locomotion. Result of this project is a legged robot, which can walk using tripod, wave and ripple gait and is equipped with sonars, force-sensitive resistors and encoders. Robot is controlled and monitored from user interface program. It can display data from sensors and positions of robot’s legs. The robot can be used to test and verify algorithms, gaits and features of walking robots.
![]()
![]()

Petr Dvořáček
kartézské genetické programování, aproximační počítání, optimalizace
Počítačová architektura a vestavěné systémy Nekonvenční výpočetní techniky
V posledních letech klademe stále větší důraz na energetickou úspornost integrovaných obvodů. Můžeme vytvořit aproximační obvody, které nesplňují specifikovanou logickou funkci, a které jsou cíleně navrženy ke snížení plochy, zpoždění a příkonu. Tyto přibližně pracující obvody lze využít v mnoha aplikacích, kde lze tolerovat chyby, obzvláště ve zpracování obrazu. Tato práce popisuje evoluční návrh aproximačních obvodů pomocí kartézského genetického programování (CGP). Díky paralelnímu výpočtu fitness a různým akceleracím byla urychlena evaluace 8-bitové násobičky více než 170 krát oproti standardnímu přístupu. Pomocí inkrementální evoluce byly vytvořeny různé aproximační násobičky a použity v procesu potlačení nemaximálních hodnot v detekci hran.